







一、从高斯消元法到矩阵乘法:
1.1 高斯消元法
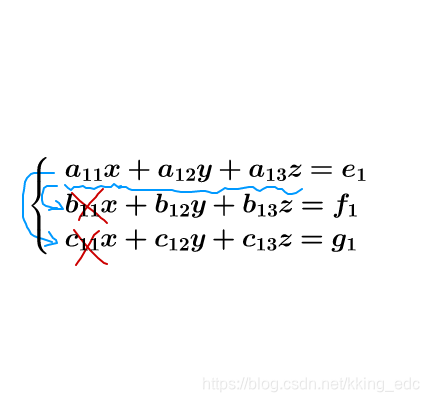
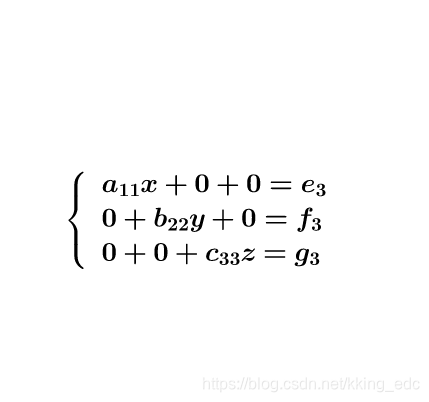
假设存在如下的方程:

将方程化为如下的形式是高斯消元法的目标:
{
R
=
?
G
=
?
B
=
?
\begin{cases} R=?\\G=?\\B=? \end{cases}
⎩⎪⎨⎪⎧R=?G=?B=?
思路:
首先利用第一行消去第二行和第三行的第一个元素:
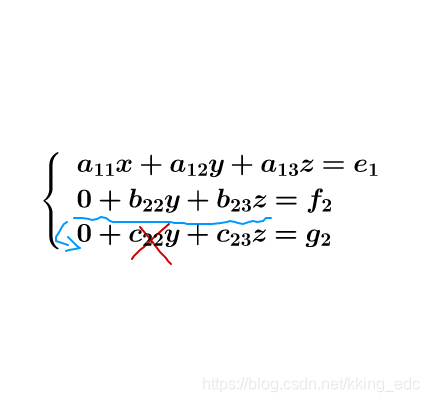
接着利用第二行消去第三行的第二个元素:
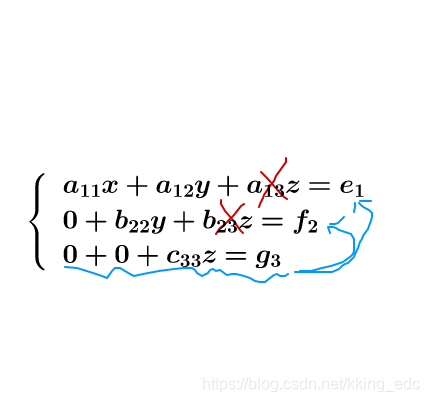
接着反过来,用第三行消去第一行和第二行的第三个元素:
接着用第二行消去第一行的第二个元素:
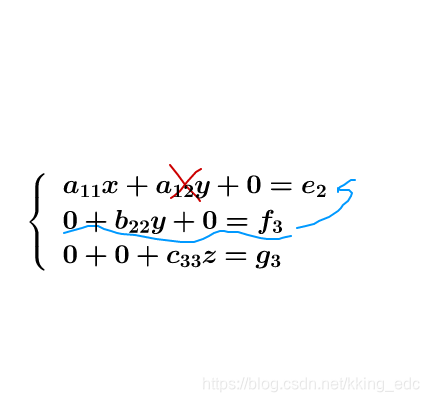
最后达到目标:
1.2 用增广矩阵描述高斯消元法
假设方程为:
则增广矩阵为:

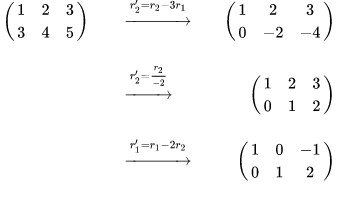
整个过程可以描述为:
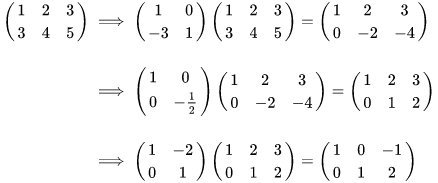
1.3 利用矩阵乘法:
上述过程的第一次运算用矩阵乘法可以描述为:

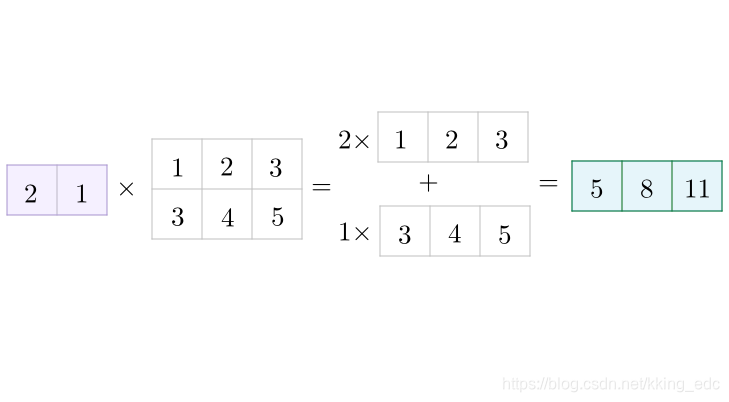
多行乘法:

这一步实际表达了两个过程:
- 第一行不变: r 1 ′ = r 1 r_1'=r_1 r1′=r1
- 第二行改变: r 2 ′ = r 2 − 3 r 1 r_2'=r_2-3r_1 r2′=r2−3r1
用矩阵乘法则表示为:

所以利用矩阵乘法,整个高斯消元法就可以表示如下:
https://www.matongxue.com/madocs/755.html
二、如何理解矩阵乘法:
一个正确的观点是将矩阵看成是函数,这样很多疑惑就可以迎刃而解。
2.1 矩阵是一个函数:
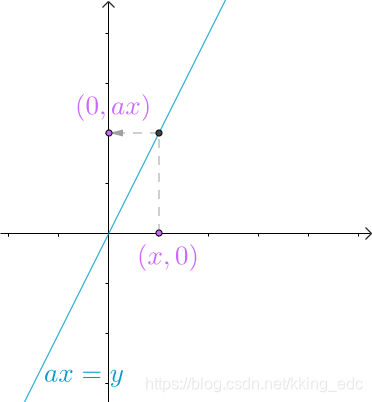
直线函数与矩阵:
我们熟悉的直线函数
a
x
=
y
ax=y
ax=y把
(
x
,
0
)
(x,0)
(x,0)点映射到
(
0
,
a
x
)
(0,ax)
(0,ax)点:
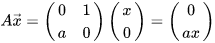
我们通过矩阵
A
x
→
=
y
→
A\overrightarrow{x}=\overrightarrow{y}
Ax=y也可以完成这个映射,令:
A
=
(
0
1
a
0
)
A=\begin{pmatrix} 0&1\\a&0 \end{pmatrix}
A=(0a10)
则:
矩阵的优点:
对于
a
x
=
y
,
x
∈
R
,
y
∈
R
ax=y,x\in R,y\in R
ax=y,x∈R,y∈R只能完成从实数到实数的映射:
x
→
y
⟹
R
→
R
x\to y\implies R\to R
x→y⟹R→R
但是:
A
x
→
=
y
→
,
x
→
∈
R
n
,
y
→
∈
R
m
A\overrightarrow{x}=\overrightarrow{y},\overrightarrow{x}\in R^n,\overrightarrow{y}\in R^m
Ax=y,x∈Rn,y∈Rm可以完成更广泛的映射:
x
→
→
y
→
⟹
R
n
→
R
m
\overrightarrow{x}\to \overrightarrow{y}\implies R^n\to R^m
x→y⟹Rn→Rm
为了完成这点,矩阵
A
A
A就不再是系数a了,而是一个函数(或者说是映射)
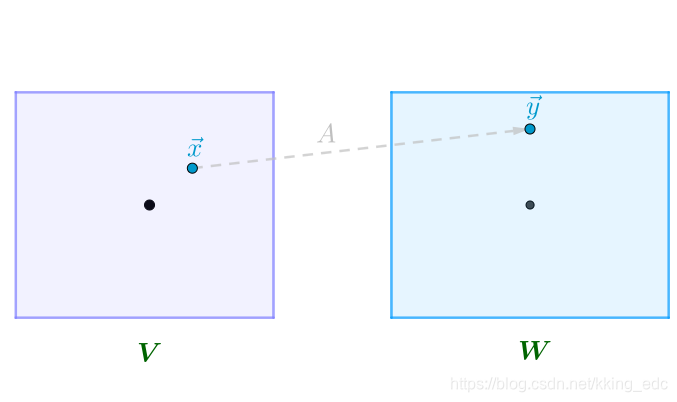
假设
x
→
\overrightarrow{x}
x所在平面为
v
v
v,而
y
→
\overrightarrow{y}
y所在平面为
W
W
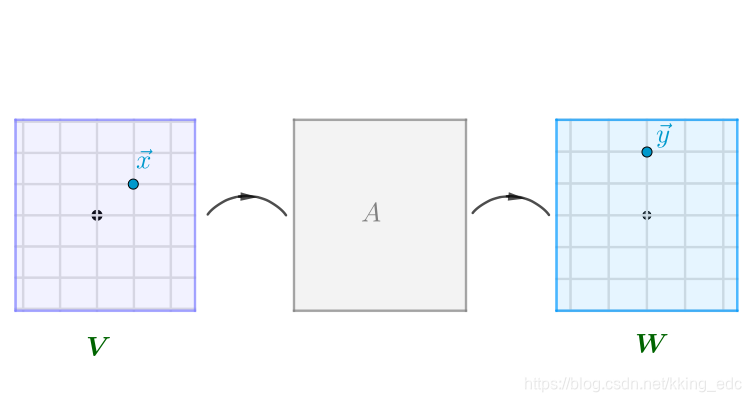
W,
x
→
\overrightarrow{x}
x通过矩阵
A
A
A映射到了
y
→
\overrightarrow{y}
y,可以如下表示:
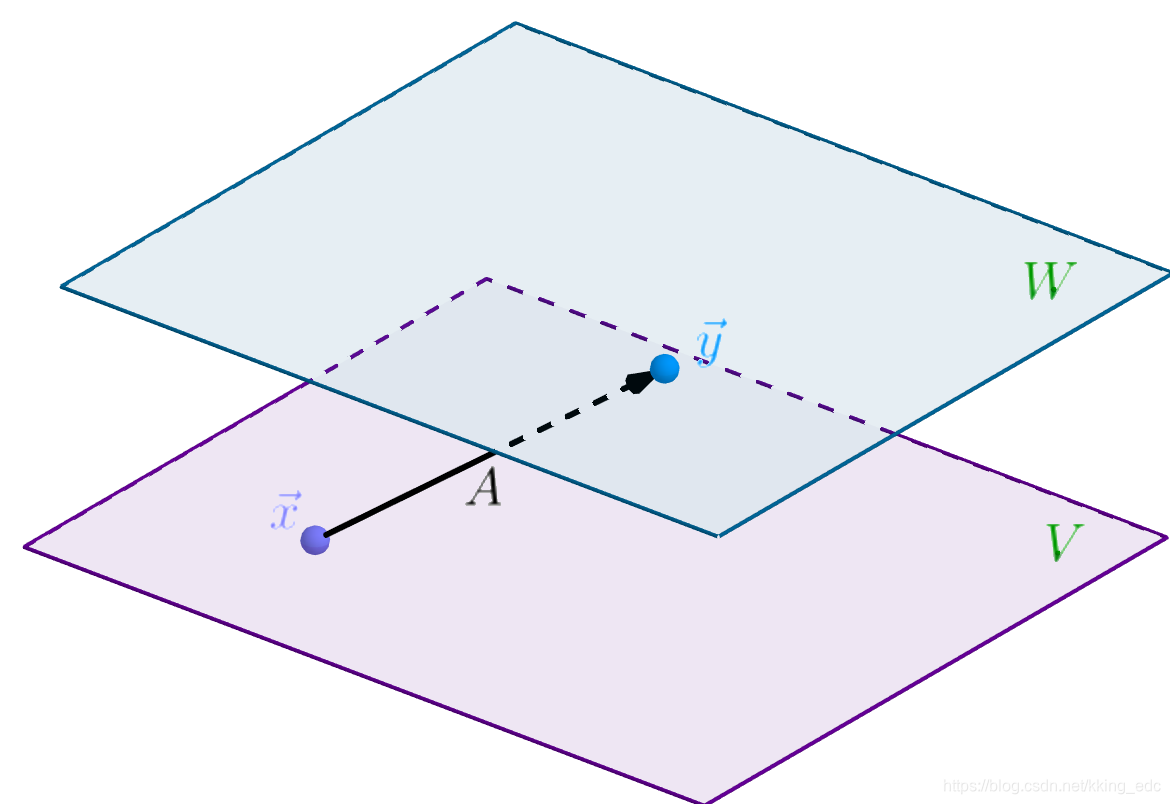
A这个映射的特别之处是,V上的直线通过A映射到W上依然是直线,所以矩阵也被称为线性映射。
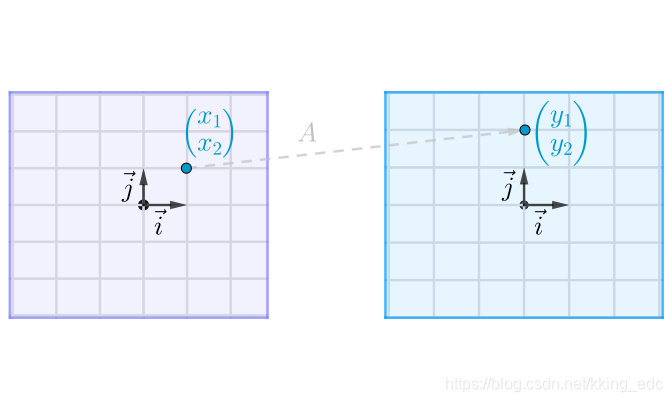
2.2 矩阵作为函数的工作方式:
将之前表示线性映射的3D图变为2D图:
为了绘图方便,
x
→
\overrightarrow{x}
x所在平面V,
y
→
\overrightarrow{y}
y所在平面W,都是二维平面,即
R
2
R^2
R2
坐标:
研究线性映射,最重要的是搞清楚当前处在哪个基下,首先看:
x
→
\overrightarrow{x}
x,
y
→
\overrightarrow{y}
y的基默认为各自空间向量空间下的自然基,其自然基为(即
R
2
R^2
R2下的自然基):
所以可以得到:

如下图所示:
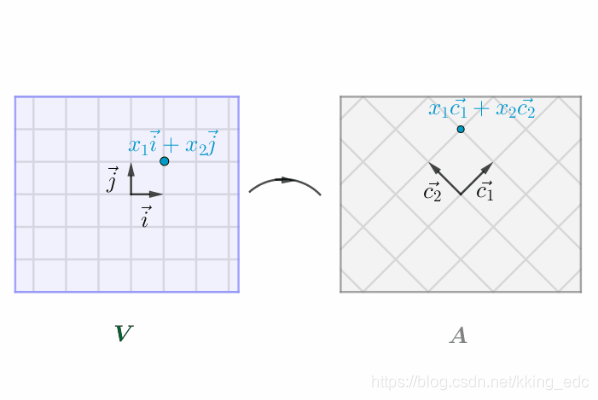
映射法则的工作原理:
为了说清映射法则A是怎么工作的,将A用一个空间表示,V会通过A映射到W:
设:
A
=
(
c
1
→
c
2
→
)
A=(\overrightarrow{c_1}\quad\overrightarrow{c_2})
A=(c1c2)
整个映射过程如下所示:
根据矩阵乘法的规则可以得到(可以理解为
c
1
→
,
c
2
→
\overrightarrow{c_1},\overrightarrow{c_2}
c1,c2两个向量的一个线性组合):

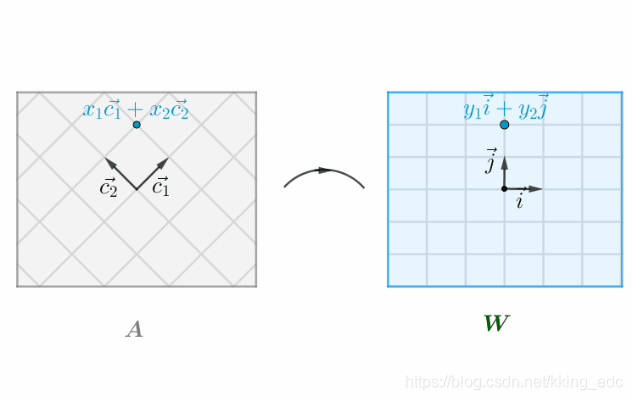
则
A
x
→
A\overrightarrow{x}
Ax相当于在A空间中,以
c
1
→
,
c
2
→
\overrightarrow{c_1},\overrightarrow{c_2}
c1,c2为基,坐标为
(
x
1
x
2
)
\begin{pmatrix}x_1\\x_2\end{pmatrix}
(x1x2)的向量:
再将
A
x
→
A\overrightarrow{x}
Ax向量用自然基表示:
整体来说,就是基改变,导致向量的坐标发生改变:
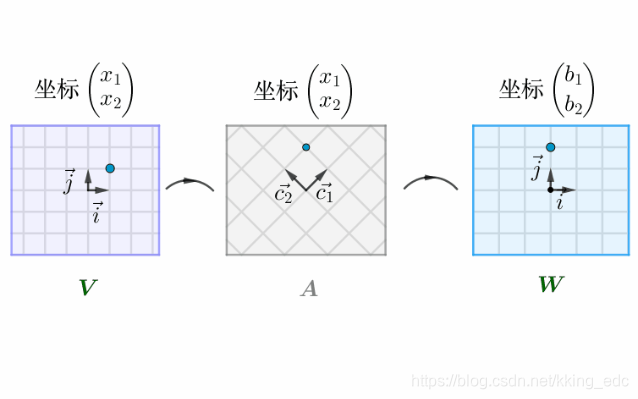
注意矩阵乘法不满足交换律
https://www.matongxue.com/madocs/555.html
2.3 矩阵运算所满足的定律
- A + B = B + A ( 加 法 交 换 律 ) A+B=B+A(加法交换律) A+B=B+A(加法交换律)
- A + ( B + C ) = ( A + B ) + C ( 加 法 结 合 律 ) A+(B+C)=(A+B)+C(加法结合律) A+(B+C)=(A+B)+C(加法结合律)
- A ∗ ( B ∗ C ) = ( A ∗ B ) ∗ C ( 乘 法 结 合 律 ) A *(B * C)=(A*B)*C(乘法结合律) A∗(B∗C)=(A∗B)∗C(乘法结合律)
- A ∗ ( B + C ) = A ∗ B + A ∗ C ( 分 配 律 ) A*(B+C)=A*B+A*C(分配律) A∗(B+C)=A∗B+A∗C(分配律)
- k ∗ ( A + B ) = k ∗ A + k ∗ B k*(A+B)=k*A+k*B k∗(A+B)=k∗A+k∗B
- ( A + B ) ∗ C = A ∗ C + B ∗ C 9 ( 分 配 律 ) (A+B)*C=A*C+B*C9(分配律) (A+B)∗C=A∗C+B∗C9(分配律)
- A ∗ I = I ∗ A = A ( 单 位 矩 阵 的 乘 法 属 性 ) A*I=I*A=A(单位矩阵的乘法属性) A∗I=I∗A=A(单位矩阵的乘法属性)
注意上面所有的+都可以替换为-
三、数量矩阵&单位矩阵
3.1 单位矩阵
主对角线上的数字都是1,其余都是0的矩阵称为单位矩阵,即:
(
1
…
0
⋮
⋱
⋮
0
…
1
)
\begin{pmatrix}1&\dots&0\\\vdots&\ddots&\vdots\\0&\dots&1\end{pmatrix}
⎝⎜⎛1⋮0…⋱…0⋮1⎠⎟⎞
3.2 数量矩阵
设I是单位矩阵,k是任何数,则kE称为数量矩阵,即:
k
E
=
(
k
…
0
⋮
⋱
⋮
0
…
k
)
kE=\begin{pmatrix}k&\dots&0\\\vdots&\ddots&\vdots\\0&\dots&k\end{pmatrix}
kE=⎝⎜⎛k⋮0…⋱…0⋮k⎠⎟⎞
四、初等矩阵
初等矩阵是指由单位矩阵经过一次初等变换得到的矩阵。
五、行等价
A和B行等价,就是说A经过若干次初等行变换可以变成B















 1262
1262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









